|
Общие вопросы начинающих
|
|
| Space | Дата: Вторник, 31.05.2011, 15:49 | Сообщение # 16 |
|
Администратор
Язык программированя: BascomAVR
Группа: Администраторы
Сообщений: 327
Репутация: 8
Статус: Offline
| Quote (Krish) а как её сделать изображением не знаю(
файл->экспорт и выбираешь формат и разрешение, и сохраняешь

|
| |
|
|
| Krish | Дата: Вторник, 31.05.2011, 16:03 | Сообщение # 17 |
|
Группа: Пользователи
Сообщений: 184
Репутация: 2
Статус: Offline
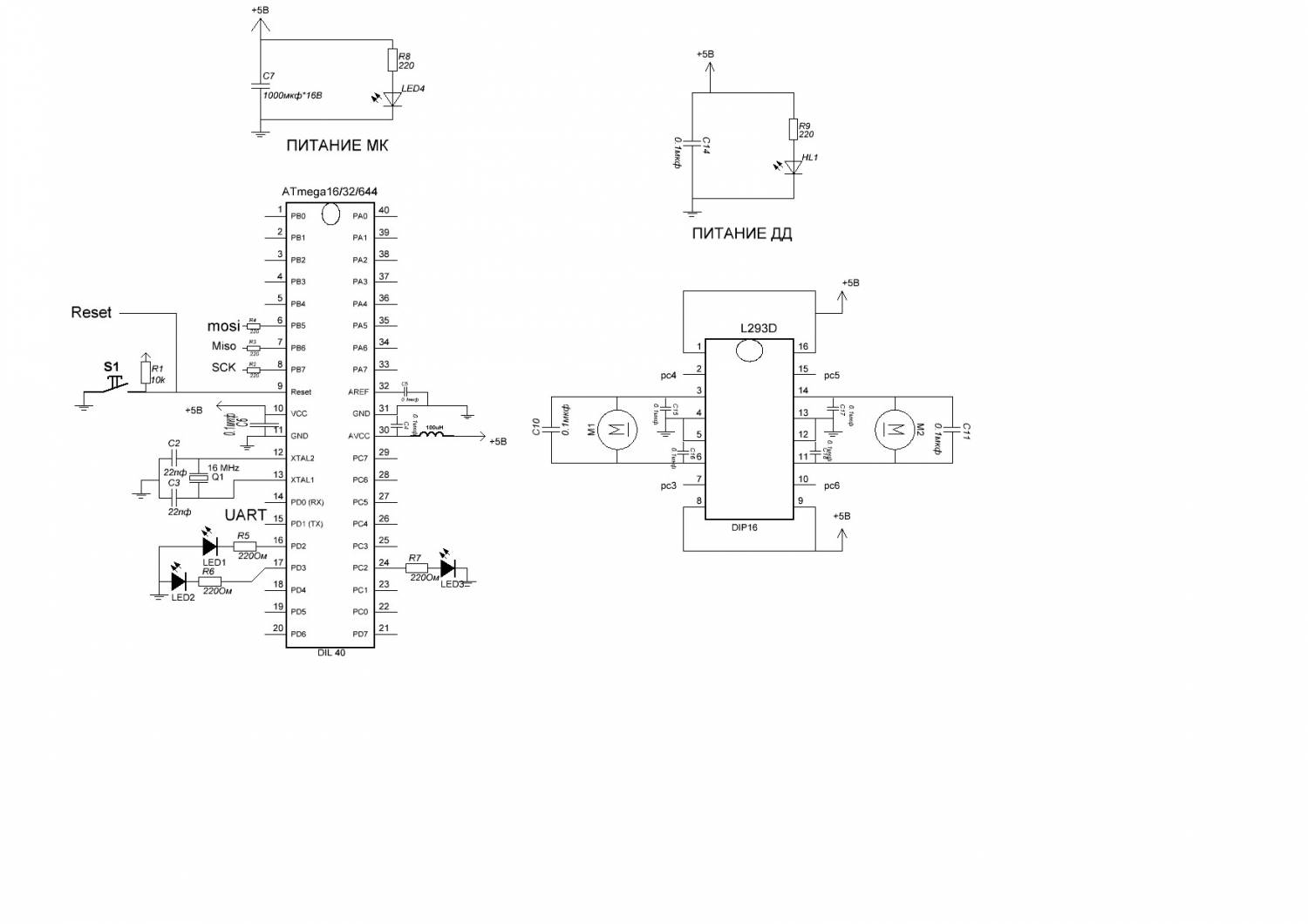
| Вот схема
LacOS
|
| |
|
|
| nightmare | Дата: Вторник, 31.05.2011, 17:47 | Сообщение # 18 |
|
Язык программированя: C,C#
Группа: Проверенные
Сообщений: 133
Репутация: 3
Статус: Offline
| Quote А что если батарея ровно 6В, можно подключать его к мк, он впринципе же не згорит?
В даташите на первой странице...
Quote У меня есть аккумуляторы на 0.6А, 4 палочки по 1.25В, но они быстро сели, почему?!
а) Они старые и дохлые
б) Они были не полностью заряжены
в) Робот потребляет много тока
Quote А вообще если я его вообще убиру хуже не станет?
Напряжение без источника опорного напряжения при помощи АЦП измерить не получится.
На схеме на PD2 и PD3 светодиоды не правильно подкллючены.
R1 по даташиту 4.7 К, хотя и 10 К можно.
По даташиту L1 на 10 микрогенри.
Зачем LED4 если есть HL1?
 russian-robots@conference.jabber.ru - jabber чат для робототехников russian-robots@conference.jabber.ru - jabber чат для робототехников
Сообщение отредактировал nightmare - Вторник, 31.05.2011, 17:54 |
| |
|
|
| Krish | Дата: Вторник, 31.05.2011, 18:26 | Сообщение # 19 |
|
Группа: Пользователи
Сообщений: 184
Репутация: 2
Статус: Offline
| Quote (nightmare) На схеме на PD2 и PD3 светодиоды не правильно подкллючены. R1 по даташиту 4.7 К, хотя и 10 К можно. По даташиту L1 на 10 микрогенри. Зачем LED4 если есть HL1?
Про подключены светодиоды я знаю что не правильно, но работают они хорошо))
L1 стоит на 10 мкГн я просто забыл подредактить.
ДД, это отдельная плата, так удобнее узнать есть ли питание.
Глобальных проблем же нет со схемой?
Насчет AREF как сделать чтоб он питался от внутреннего источника? фьюз данной опции как называется?
LacOS
|
| |
|
|
| nightmare | Дата: Вторник, 31.05.2011, 21:59 | Сообщение # 20 |
|
Язык программированя: C,C#
Группа: Проверенные
Сообщений: 133
Репутация: 3
Статус: Offline
| См. регистры которые к АЦП относятся, это там. Вообще в баскоме это без регистров делается, в хелпе посмотри.
russian-robots@conference.jabber.ru - jabber чат для робототехников
|
| |
|
|
| Krish | Дата: Вторник, 31.05.2011, 22:42 | Сообщение # 21 |
|
Группа: Пользователи
Сообщений: 184
Репутация: 2
Статус: Offline
| Да я прочитал теории про фьюзы всё нашёл.
Блин чтото с программами плохи мои дела(( что то не получается писать их:((
Заказал ORduino, может дело в схеме, а не в программе(( 
Блин мне учитель по робототехника ещё дал сложное задание написать математику для политех соревнований, я просто в шоке, завтра робота надо нести на выставку городскую, а всё что он может это RC5, дрыгать сервой и объежать препятствие с шарпом.Добавлено (31.05.2011, 22:42)
---------------------------------------------
nightmare, покажи своего робота, интересно очень)
LacOS
|
| |
|
|
| nightmare | Дата: Вторник, 31.05.2011, 23:45 | Сообщение # 22 |
|
Язык программированя: C,C#
Группа: Проверенные
Сообщений: 133
Репутация: 3
Статус: Offline
| Quote Блин мне учитель по робототехника ещё дал сложное задание написать математику для политех соревнований
Выложи сюда, придумаем.
Из законченных у меня только один робот:
http://cdxp.zx6.ru/archives/707
Есть второй не законченный, застопорился на энкодерах, не скоро доделаю.
Quote завтра робота надо нести на выставку городскую
Прикольно, у нас такие выставки не проходят...
ХЗ, может я через чур идеалист, но думаю что роботов которые можно показать на выставке на робофоруме с десяток не наберется.
russian-robots@conference.jabber.ru - jabber чат для робототехников
|
| |
|
|
| Krish | Дата: Среда, 01.06.2011, 09:12 | Сообщение # 23 |
|
Группа: Пользователи
Сообщений: 184
Репутация: 2
Статус: Offline
| Quote (nightmare) Выложи сюда, придумаем.
Да я сейчас своего "роберто-1" доделаю потом начну делать математику, мне учитель дал идеи и теорию, мне надо её в программный код совместить.
+ Я ещё жду деталей на лайнтрейсера.
Quote (nightmare) Прикольно, у нас такие выставки не проходят... ХЗ, может я через чур идеалист, но думаю что роботов которые можно показать на выставке на робофоруме с десяток не наберется.
Выставки то у нас проходят но они гнилые, все тащят своих NXT Lego, на примитивной программе и примитивном механизме, эти выставки для школьников, чтобы они приходили к нам в кружок.
Quote (nightmare) ХЗ, может я через чур идеалист, но думаю что роботов которые можно показать на выставке на робофоруме с десяток не наберется.
Ты полностью прав! Все копируют идеи, потому что своей теоритической базы почти нет:(
А вот энкодеры в чём их плюс? Мне все говорят что нужно на сумо их ставить или для роботов в кегельринг...
LacOS
|
| |
|
|
| nightmare | Дата: Среда, 01.06.2011, 13:47 | Сообщение # 24 |
|
Язык программированя: C,C#
Группа: Проверенные
Сообщений: 133
Репутация: 3
Статус: Offline
| Хрень тебе говорят, ни там ни там они не нужны.
Энкодеры для давней идеи - робот для прохождения лабиринта, там надо расстояние измерять.
russian-robots@conference.jabber.ru - jabber чат для робототехников
Сообщение отредактировал nightmare - Среда, 01.06.2011, 15:53 |
| |
|
|
| Krish | Дата: Среда, 01.06.2011, 17:38 | Сообщение # 25 |
|
Группа: Пользователи
Сообщений: 184
Репутация: 2
Статус: Offline
| nightmare, воооо, что интересует! Bluetooth!
Скажи, вот эти модули, как они программно соед. с роботом? Что то искал не нашёл. Вообще как он управляется ? можно ли через bt д/у сделать?
Я про bt не чего не знаю, приятно было бы если space что нибудь сделал в плане теории, это давольно интересная тема.Добавлено (01.06.2011, 17:38)
---------------------------------------------
Всё я нашёл себе занятие на неделю, надо бы почитать про wifi bt для робота.. rc5 уже не катит.
LacOS
|
| |
|
|
| nightmare | Дата: Среда, 01.06.2011, 17:53 | Сообщение # 26 |
|
Язык программированя: C,C#
Группа: Проверенные
Сообщений: 133
Репутация: 3
Статус: Offline
| Там нет никакой сложной теории, к UART'у подключаешь специальный BT модуль и далее как с COM портом работаешь, недавно вот такой модуль прислали, испытал, ничего сложного. Модуль примерно 280 р стоит.
http://we.easyelectronics.ru/nightma....05.html
russian-robots@conference.jabber.ru - jabber чат для робототехников
|
| |
|
|
| Krish | Дата: Среда, 01.06.2011, 18:31 | Сообщение # 27 |
|
Группа: Пользователи
Сообщений: 184
Репутация: 2
Статус: Offline
| nightmare, где ты его купил? ebay?
LacOS
|
| |
|
|
| nightmare | Дата: Среда, 01.06.2011, 19:08 | Сообщение # 28 |
|
Язык программированя: C,C#
Группа: Проверенные
Сообщений: 133
Репутация: 3
Статус: Offline
| Да
russian-robots@conference.jabber.ru - jabber чат для робототехников
|
| |
|
|
| Krish | Дата: Среда, 01.06.2011, 19:25 | Сообщение # 29 |
|
Группа: Пользователи
Сообщений: 184
Репутация: 2
Статус: Offline
| Блин я что то запутался, коды Си в CVAVR и WinAVR разные? нельзя ли сначало программу написать в CVAVR а кампилировать в WinAVR ? а то я на роботспейс прочитал что это разные программы и программируют там по разному, я учу язык си AVR-GCC (он для работы с WinAVR), он что отличается от языка для работы с CVAVR ? Я что-то запутался!
LacOS
|
| |
|
|
| Dimsan | Дата: Среда, 01.06.2011, 19:44 | Сообщение # 30 |
|
Язык программированя: Си, Делфи
Группа: Модераторы
Сообщений: 65
Репутация: 1
Статус: Offline
| Да, немного отличается. Но язык-то один.
Писать программу, компилировать и прошивать МК можно в CVAVR. Не обязательно писать программу в одном, компилировать в другом, а прошивать через третье...
|
| |
|
|