| Главная » Статьи » Схемы » Периферия |
Микросхема L293D (драйвер двигателей)
Знаю-знаю, что вы сейчас наверняка думаете "ну, сколько можно теории, давай уже к практической части" вас достала уже эта теория, понимаю, но всё что пишу вам действительно пригодится. Тем более могу обрадовать мы уже на подходе к первому проекту. И для начинающего я считаю, он более чем серьёзен. Но пока не об этом. И так драйвер двигателе L293D.
 Распространённая микросхема в робототехнике. Используется для управления моторами. Драйвер преобразовывает сигналы малой мощности, поступающие например с микроконтроллера, в токи, которых будет достаточно чтобы управлять мотором. Есть, конечно и другие способы управления моторами. Например, за счёт микросхемы ULN2003 и 4 реле. Но давайте пока остановимся на L293D, т. к. это самое простое решение. Микросхемой можно управлять сразу двумя моторами. Присутствует на микросхеме и ШИМ - широтно модулированный сигнал. За счёт такого сигнала, подключив микроконтроллер, можно контролировать скорость мотора. Питание логики микросхемы и моторов, раздельное, что позволяет питать моторы с напряжением 4,5 - 36 вольта. Теперь поступим так, чтобы стало всё более понятно, рассмотрим назначение выводов. 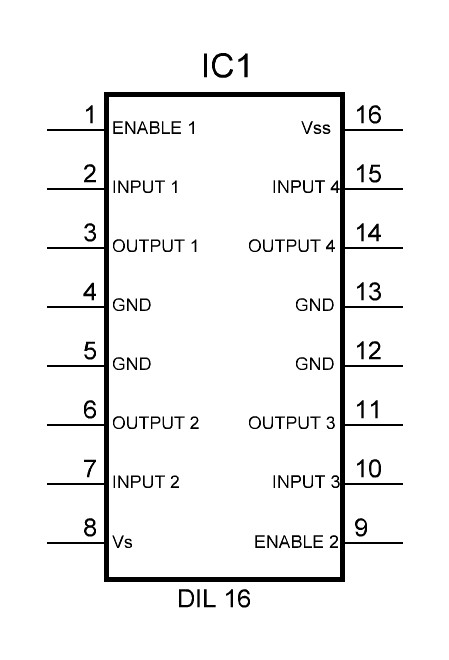
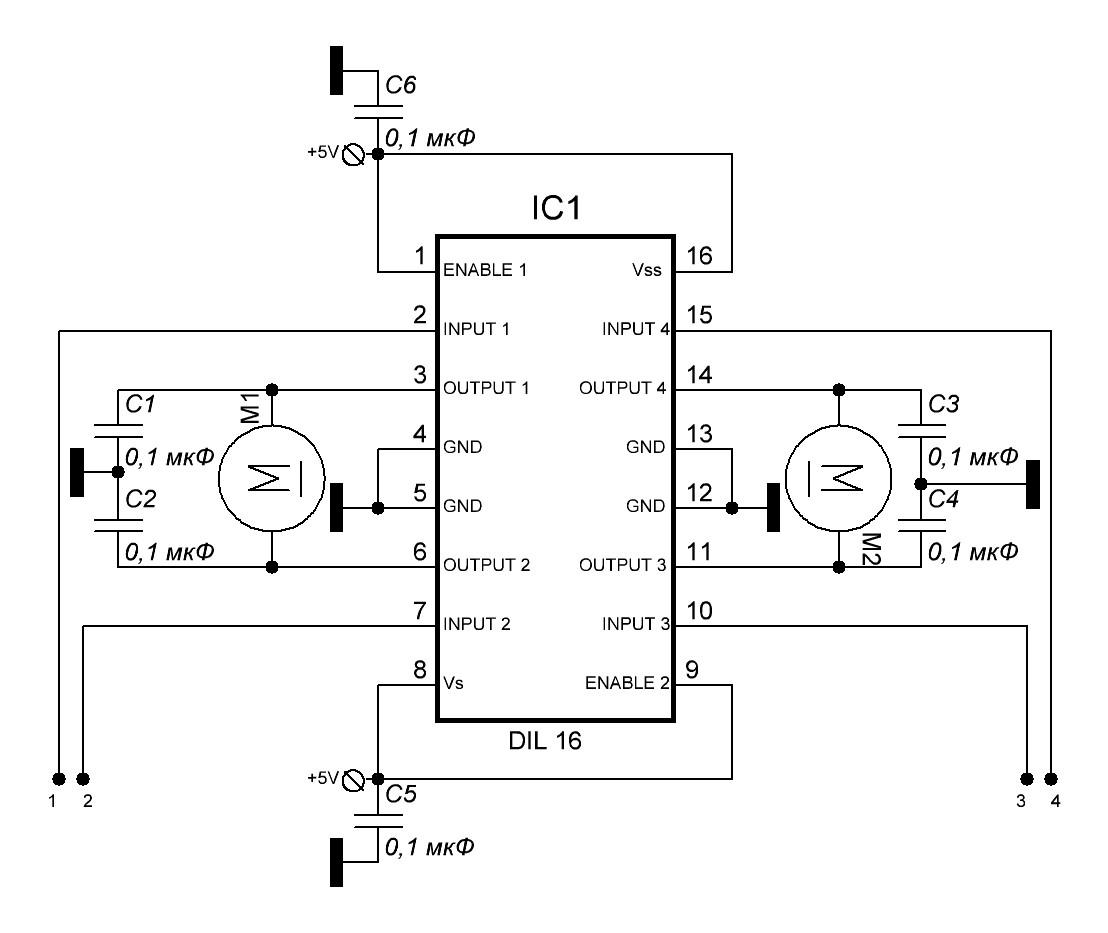 На точки 1, 2, 3, 4 подаётся управляющий сигнал. Питание общее 5 вольт. 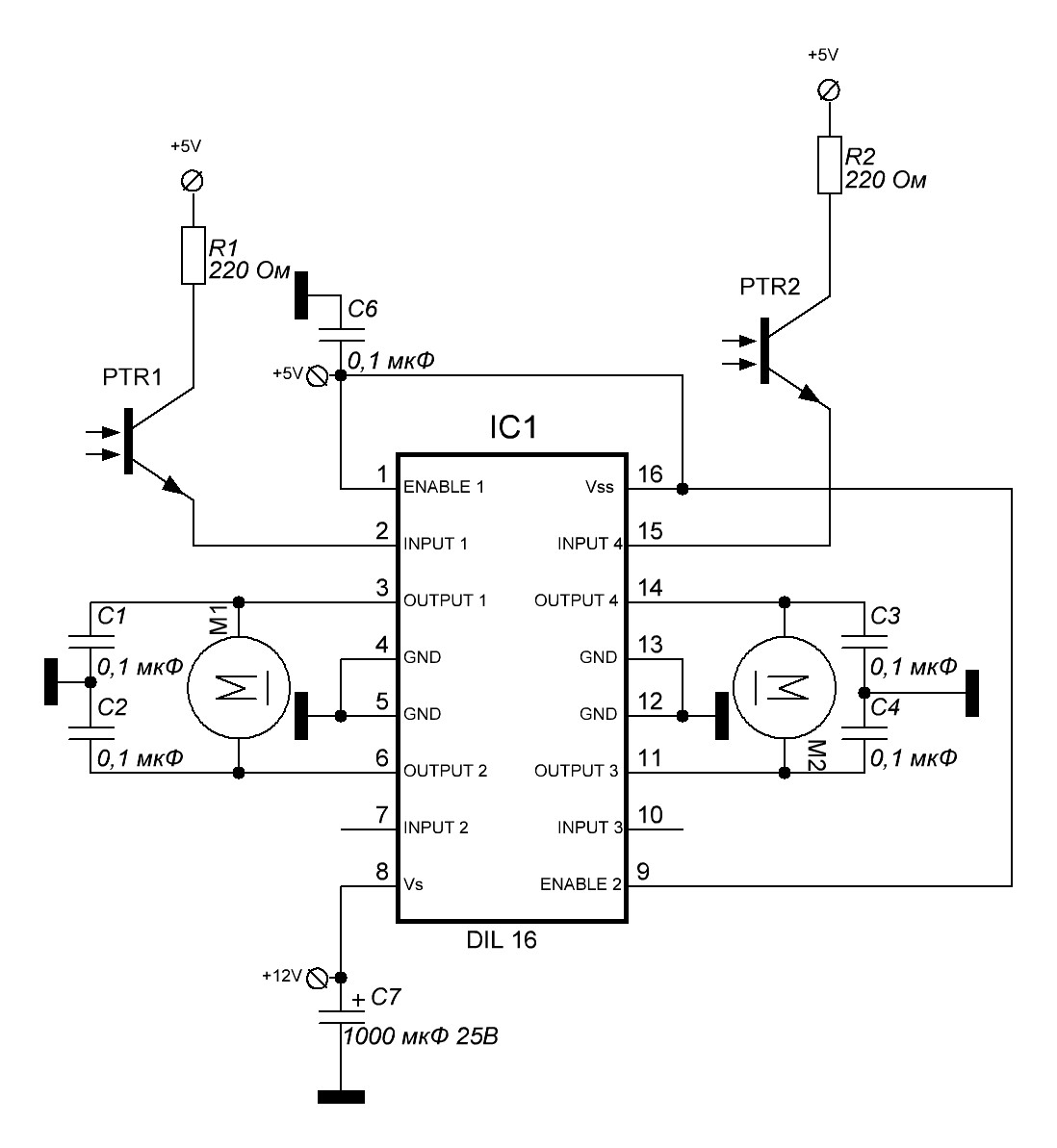 Здесь раздельное питание. В виде управляющего сигнала взял фототранзисторы. Если на один из них попадёт свет, то 1-н из моторов закрутится, если на оба попадёт свет, то закрутится 2-а мотора. Если переставить фототранзисторы на выводы INPUT 2, INPUT 3, то моторы при попадание света на фототранзисторы будут крутиться в обратную сторону. 


| |
| Категория: Периферия | Добавил: Space (09.01.2011) | | |
| Просмотров: 4120 | |
| Всего комментариев: 0 | |