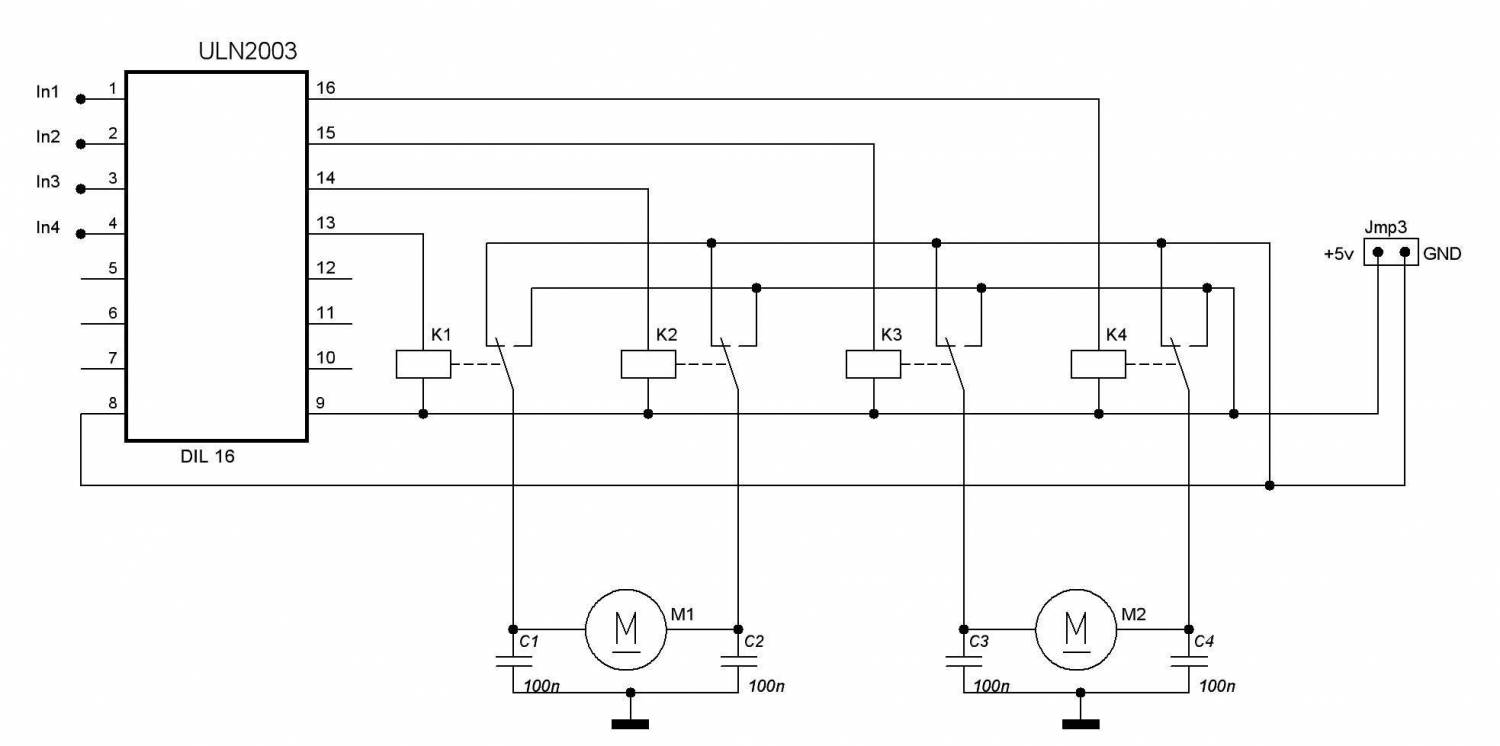
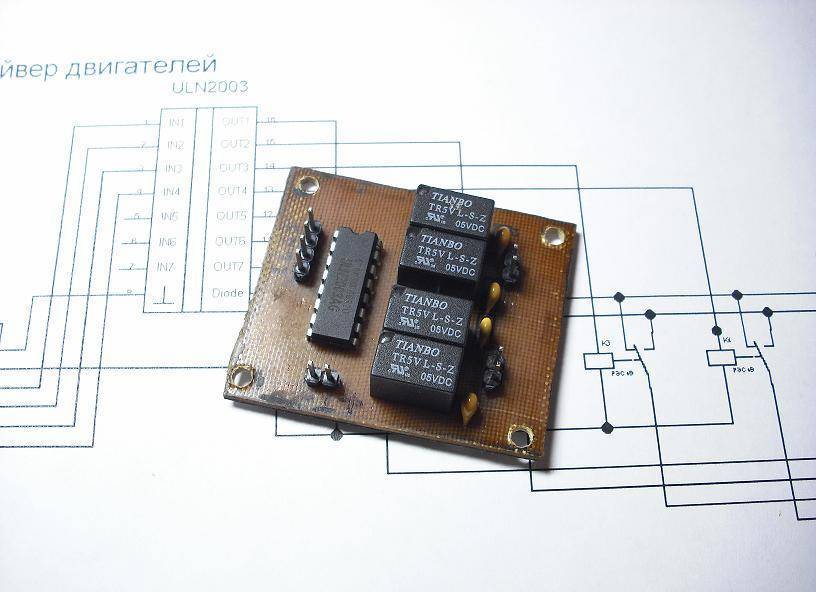
И так этот драйвер собран всего на 4 реле и микросхеме ULN2003. Очень популярная и легко доступная ULN2003,
способная протащить до 500мА на каждый из своих семи сборок
дарлингтона. Выходы можно включать в параллель, чтобы повысить
предельный ток. Драйвер двигателей на ней выходит просто
отличный. Что самое важное за время работы с ней я не заметил чтобы она
нагревалась. Даже тёплой не стала. Что собственно и порадовало. Что не
скажешь про микросхему L293D. Она в любом случае в процессе работы
начинает греться. Причём парой очень сильно. А вот собственно схема:
Что касается управления через шим. Тоже можно сделать. Кидаем допустим
In1 на PORTD.3, а In4 на шим PORTD.4 (для меги16) и всё. Для движения
вперёд шим от 1 до 95(установить логическую единицу), а для движения
назад от 150 до 250(установить логический ноль). Питается вся схема от 5
вольт.
В принципе всё. Пользуйтесь :) Скачать схему, разводку можно тут.
Добрый день! А про реализацию ШИМ на данной схеме можно подробнее рассказать? У меня есть уже готовая плата (практически идентичная), но "крутящая" четыре двигателя в обе стороны, но без ШИМ...
Подскажите, пожалуйста, как реализовать ШИМ на Меге16, с минимальными переделками схемы, для четырёх двигателей! Заранее благодарен!
И да, не забывайте, что при реализации ШИМ по данной схеме реле нужно убирать, и заменять полевиками высокочастотными. У реле ибо время открытия и закрытия слишком больше (даже у твердотелки), и оно либо вообще не откроется, либо превратит ваш ШИМ в логическую единицу