|
mouse робот
|
|
| Андрей | Дата: Четверг, 24.02.2011, 02:59 | Сообщение # 1 |
|
Группа: Пользователи
Сообщений: 18
Репутация: 0
Статус: Offline
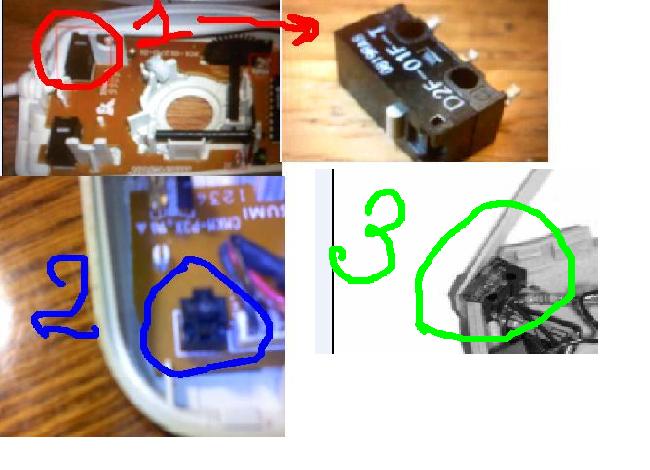
| Побродив по множеству форумов я наткнулся на довольно симпотичного робота, изготовленного в корпусе от мышки. При изучении его у меня возник вопрос: один из "датчиков" (кнопка)(обозначен 1) имеет продолговатую форму. а в моей крысе (2) он квадратный, разница есть какая-нибудь или нет? и в догонку вопрос, какая роль этой детали? как я понял это "бампер"? т.е. он определяет контакт с предметом ? и получается если контакт есть , то робот должен обьехать предмет? Добавлено (24.02.2011, 02:59)
---------------------------------------------
извиняюсь за качество фото. фотографировал на телефон 
Сообщение отредактировал Андрей - Четверг, 24.02.2011, 02:57 |
| |
|
|
| Андрей | Дата: Четверг, 24.02.2011, 03:29 | Сообщение # 2 |
|
Группа: Пользователи
Сообщений: 18
Репутация: 0
Статус: Offline
| И еще по поводу его начинки. Поскребши по углам я нашел старую зарядку от Сименса (рабочую), переходник с USB на розетку(умерший правда) и светики из фонарика. Ну светики с зарядки и переходника сниму, порт usb тоже. светики с фонарика стремные, длинные и на короткой ножке, я бы сказал даже очень короткой. на переходнике под катушкой есть странный елемент, повиду микросхема(хотя мк это сильно сказано), 6 ножек и эмблема моторолы, больше обозначений никаких(если получится сделаю более четкое фото). резисторы и катушки сниму(хотя зачем котушки), ну эт понятно.а чтобы еще оттуда снять? Р.S. извиняюсь за качество фоток, под рукой был только телефон Добавлено (24.02.2011, 03:29)
---------------------------------------------
В планах даже отдать на растерзание  самому себе mp3 плеер на 1гб, с цветным экраном, радио, микрофоном но это попозже будет самому себе mp3 плеер на 1гб, с цветным экраном, радио, микрофоном но это попозже будет  :happy: :happy:  

Сообщение отредактировал Андрей - Четверг, 24.02.2011, 03:17 |
| |
|
|
| Asondo | Дата: Четверг, 24.02.2011, 09:52 | Сообщение # 3 |
|
Администратор
Группа: Администраторы
Сообщений: 6
Репутация: 1
Статус: Offline
| На счет кнопок - без разницы какой оно там формы, главное чтобы кнопка нажималась при контакте со стеной или еще чем-нибудь типо того) Касательно хлама всякого бытового, то там ничего серьезного как правило нет, и от этого USB-контроллера от мотороллы толку для робота ни какого, увы, хотя светики и прочее это дело хорошее ^^ Пошарь на сайте, там вроде как есть упрощенные схемы для НЕпрограммируемых роботов.
З.Ы. щас пока бета-тест сайта, поэтому информацию и людей тут не так много, как хотелось бы)
|
| |
|
|
| Андрей | Дата: Воскресенье, 27.02.2011, 04:20 | Сообщение # 4 |
|
Группа: Пользователи
Сообщений: 18
Репутация: 0
Статус: Offline
| Спасибо  а схемы для непрограмируемых есть. даже навалом сколько форумов уже перечитал а схемы для непрограмируемых есть. даже навалом сколько форумов уже перечитал Добавлено (26.02.2011, 02:32)
---------------------------------------------
Думаю сегодня поехать на радиорынок и прикупить детали. По поводу них у меня будет пару вопросов:
-какой мощности брать моторчики?
-в оптической мышке если я не ошибаюсь есть фототранзисторы (на трех ножках у меня, и от сюда вытекает вопрос , если он на 3-х ножках то как его паять), которые стоят напротив светодиов(или эт сенсоры, блин запутался уже)?
-какая цена на L293D в грн(имеется в виду на укр.радио рынках)? если кто знает Добавлено (27.02.2011, 04:20)
---------------------------------------------
Вот только что доделал первого робота)))) Но сразу же появилась проблема, на свет он реагирует только при подьезде на растояние около 8-12 см от лампочки(енергосберигающей), как я понимаю надо заменить резистор , на резистор с меньшим номиналом? А вот на дневной свет реагирует нормально 
Сообщение отредактировал Андрей - Воскресенье, 27.02.2011, 11:56 |
| |
|
|
| Space | Дата: Воскресенье, 27.02.2011, 12:03 | Сообщение # 5 |
|
Администратор
Язык программированя: BascomAVR
Группа: Администраторы
Сообщений: 327
Репутация: 8
Статус: Offline
| Quote (Андрей) По поводу них у меня будет пару вопросов:
-какой мощности брать моторчики?
Бери с током потребления до 2 ампер.
Quote (Андрей) в оптической мышке если я не ошибаюсь есть фототранзисторы (на трех ножках у меня, и от сюда вытекает вопрос , если он на 3-х ножках то как его паять), которые стоят напротив светодиов(или эт сенсоры, блин запутался уже)?
это инфракрасные датчики, напротив них стоят инфракрасные-диоды
Quote (Андрей) Вот только что доделал первого робота)))) Но сразу же появилась проблема, на свет он реагирует только при подьезде на растояние около 8-12 см от лампочки(енергосберигающей), как я понимаю надо заменить резистор , на резистор с меньшим номиналом?
Фотодатчики достаточно проблемная штука. Чтобы допиться от них максимальной чувствительности нужно поиграть с сопротивлением резистора. Лучше поставь подстроечный резистор на 10ком, так быстрей будет.
Причём к каждому фотодатчику подход разный, к примеру одному фотодиоду подойдёт резистор с сопротивление 100 Ом, а другому 360 Ом.

|
| |
|
|
| Андрей | Дата: Понедельник, 28.02.2011, 03:21 | Сообщение # 6 |
|
Группа: Пользователи
Сообщений: 18
Репутация: 0
Статус: Offline
| Quote (Space) это инфракрасные датчики, напротив них стоят инфракрасные-диоды

т.е. как я понимаю для ик бамперов на будующее он пойдут? 
Quote (Space) Лучше поставь подстроечный резистор на 10ком,
если я не ошибаюсь у него 3 "ноги"
какую куда подключать? 
|
| |
|
|
| Space | Дата: Понедельник, 28.02.2011, 10:18 | Сообщение # 7 |
|
Администратор
Язык программированя: BascomAVR
Группа: Администраторы
Сообщений: 327
Репутация: 8
Статус: Offline
| да пойдут, ток схема нужна для управления ими и программа.  где точка подключаешь на input1,2,3 или 4 микросхемы l293d, или куда ты там подключал датчик
|
| |
|
|
| Андрей | Дата: Вторник, 01.03.2011, 07:31 | Сообщение # 8 |
|
Группа: Пользователи
Сообщений: 18
Репутация: 0
Статус: Offline
| не у меня L293DNE
вообщем разберусь
|
| |
|
|
| Андрей | Дата: Вторник, 29.03.2011, 19:18 | Сообщение # 9 |
|
Группа: Пользователи
Сообщений: 18
Репутация: 0
Статус: Offline
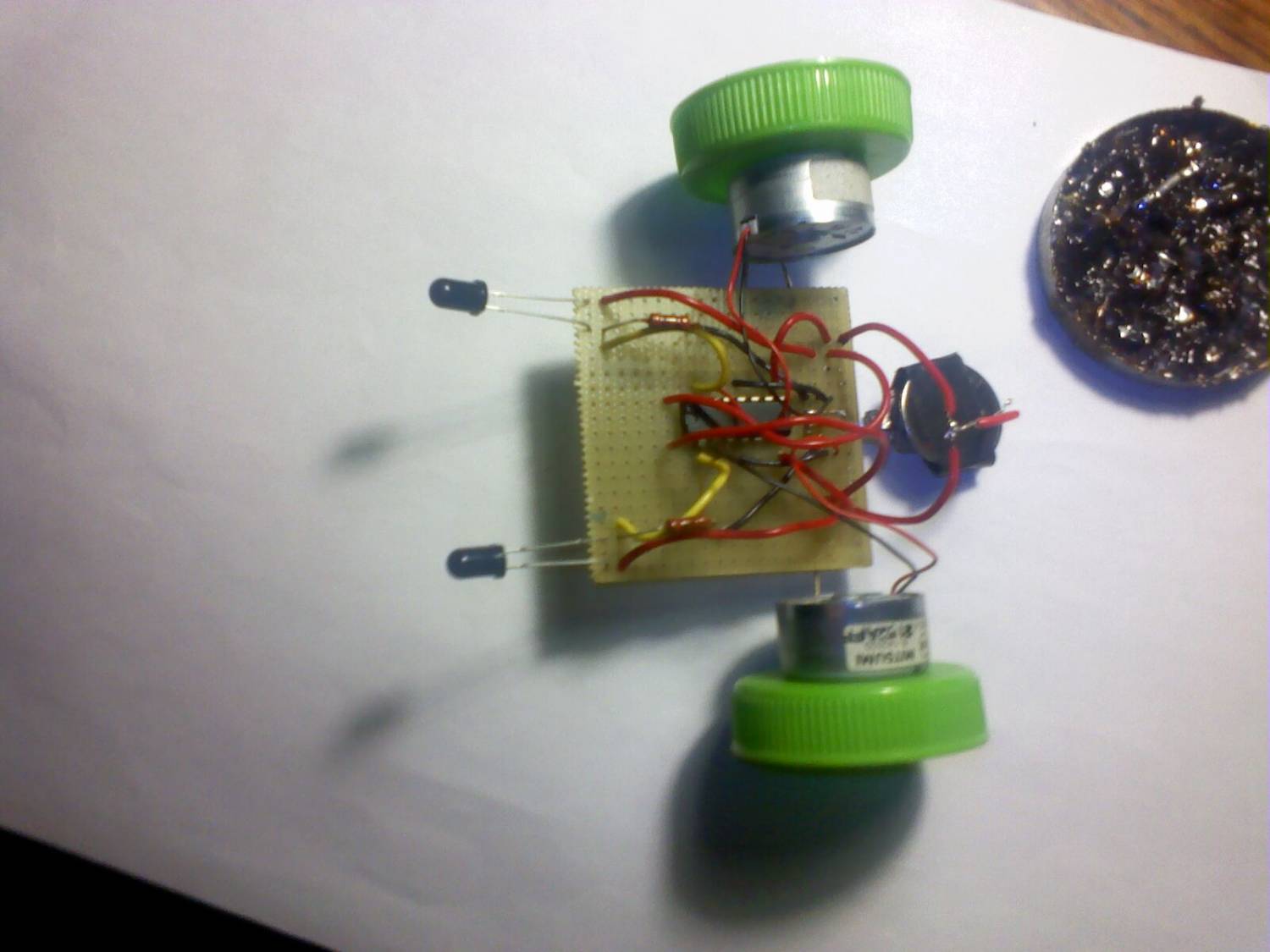
| В отсутствии норм моторов и колес решил собрать вот этого зверька  
|
| |
|
|
| Андрей | Дата: Среда, 13.04.2011, 22:35 | Сообщение # 10 |
|
Группа: Пользователи
Сообщений: 18
Репутация: 0
Статус: Offline
|  доделал на досуге, работает нормально. Но только захотел запечатлить на видео , так ДД сдох доделал на досуге, работает нормально. Но только захотел запечатлить на видео , так ДД сдох  :kolobok_evil: ,хотя он был у меня уже давно, и я часто его юзал, так что это не удивительно :kolobok_evil: :kolobok_evil: ,хотя он был у меня уже давно, и я часто его юзал, так что это не удивительно :kolobok_evil: теперь аж до степендии ждать пока $ появятся
Сообщение отредактировал Андрей - Среда, 13.04.2011, 22:38 |
| |
|
|
| nightmare | Дата: Среда, 13.04.2011, 23:27 | Сообщение # 11 |
|
Язык программированя: C,C#
Группа: Проверенные
Сообщений: 133
Репутация: 3
Статус: Offline
| Круто, а у нас в рублях платят
 russian-robots@conference.jabber.ru - jabber чат для робототехников russian-robots@conference.jabber.ru - jabber чат для робототехников
|
| |
|
|
| Андрей | Дата: Четверг, 14.04.2011, 08:26 | Сообщение # 12 |
|
Группа: Пользователи
Сообщений: 18
Репутация: 0
Статус: Offline
| Остряк
|
| |
|
|