| Главная » Статьи » Программирование » Программирование в BascomAVR |
Bot
И так мы добрались до последней темы нашего курса по BascomAVR. И посвящена она сборки робота, который объезжает препятствия за счёт шарпа(ик-датчик). Для большего удобства программу разделил на три файла. Основной это "Bot" его и нужно будет компилировать. Остальные 2 файла для настройки портов и меток на которые будет переходи программа при необходимости. Впрочем объяснять здесь особо не чего. Использовался наш контроллер вместе с модулем, питание двигателей лучше подвести отдельно. для это есть перемычка на модуле. В механике использовался двухмоторный редуктор и гусеницы TAMIYA. 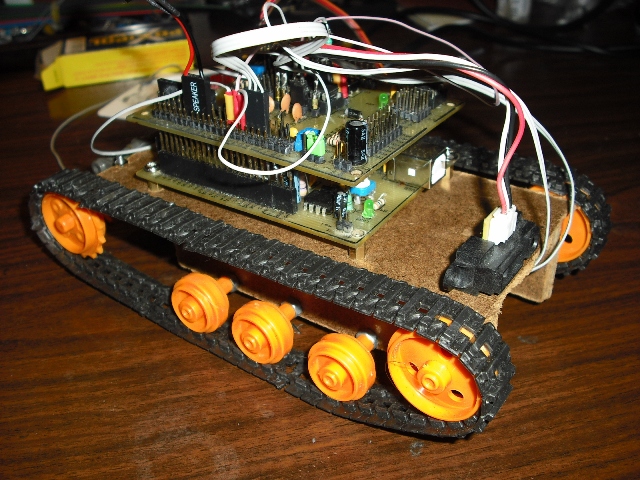 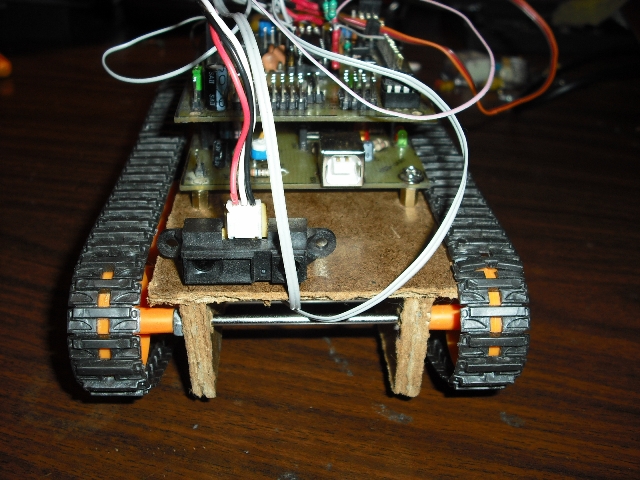   Исходник и прошивку можно скачать по ссылке. Источник: www.enore.ru | |
| Категория: Программирование в BascomAVR | Добавил: Space (05.03.2011) | | |
| Просмотров: 2846 | |
| Всего комментариев: 0 | |