| Главная » Статьи » Схемы » Контроллеры |
Модуль универсального контроллера
Чтобы пользоваться в полном объёме нашим контроллером к нему нужен модуль. Именно о таком модуле и пойдёт речь. Много здесь говорить не надо. Думаю и так понятно всё. В кратце расскажу, что есть на модуле и для чего. Самое главное все порты вводы/вывода присутствуют на плате. Возможность подключения сервоприводов с отдельным питание. Выбираем либо другой источник питание для сервоприводов, либо общее питание со всей платой. Изменяем это с помощью перемычки Jmp2. Микросхема 24LC04B внешний I2C EEPROM, драйвер двигателей L293D. Делитель напряжения (подстроечный резистор R9) для измерения напряжения аккумулятора с помощью АЦП(аналого-цифрового преобразователя - выводы мк PA0-PA7). Пара кнопок S2 и S1 для испытания программ, если они там требуются. 3 светодиода так же для испытания программ. Разъём под дисплей. Аналоговый датчик температуры TMP36. 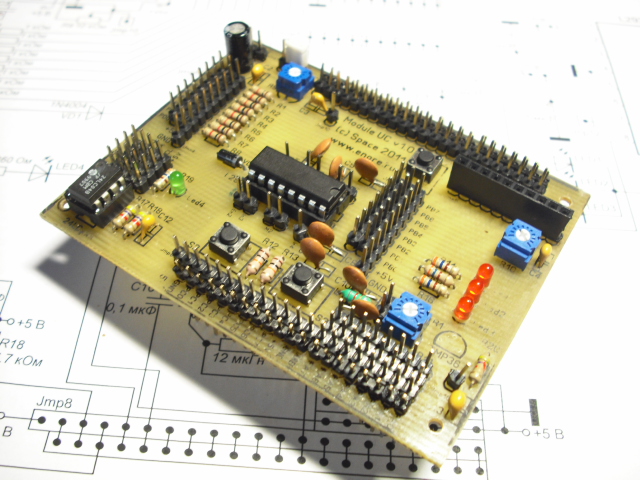 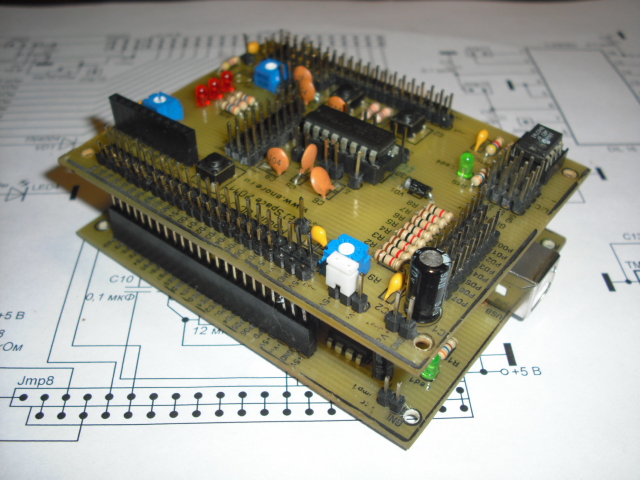 Принципиальная схема: 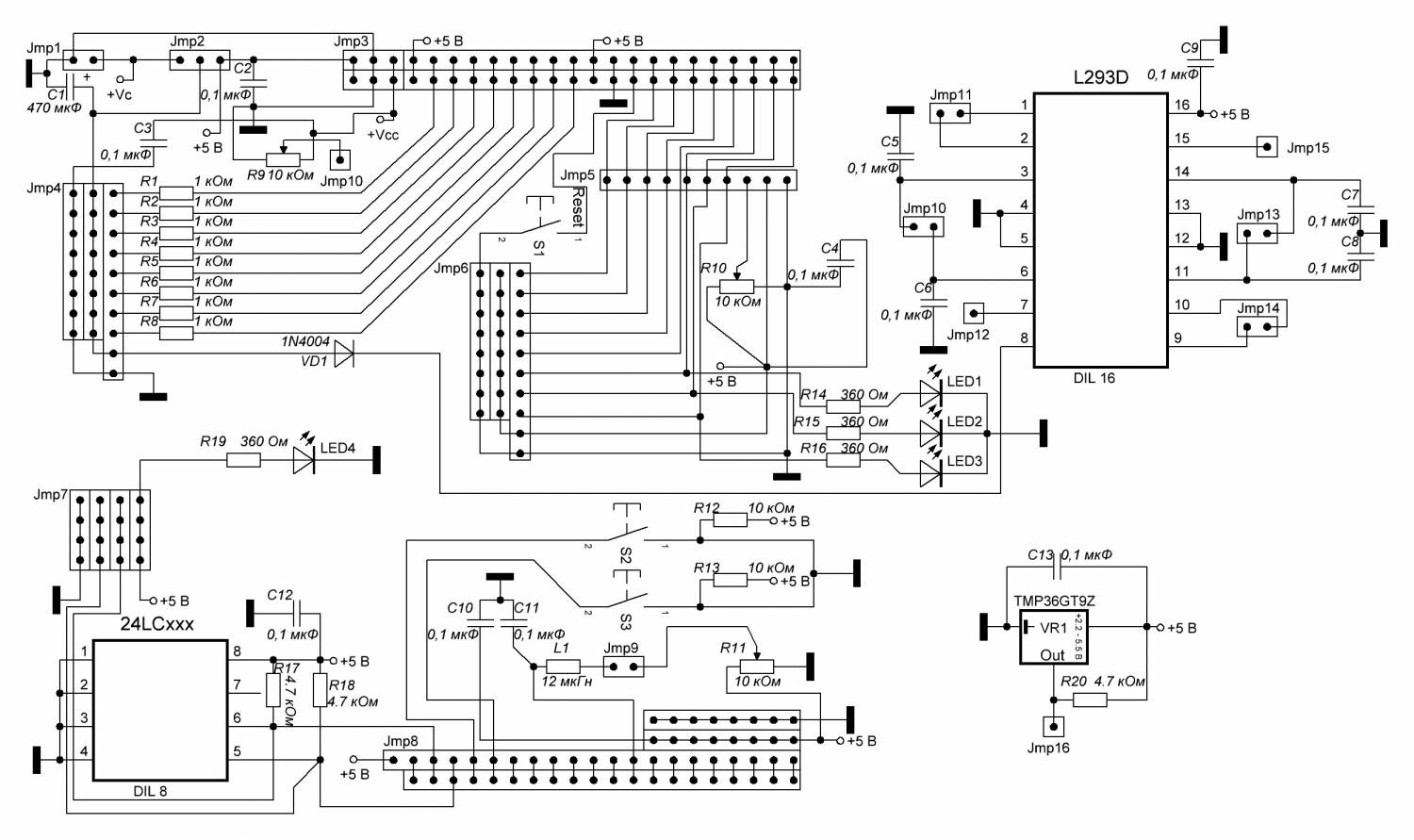 Детали необходимые в сборке: Конденсаторы: C1-470 мкФ 16 вольт - 1шт. C2-C13 - 0,1 мкФ - 12шт. Резисторы: R19, R14-R16-360Ом-4шт. R17, R18, R20 - 4,7 кОм - 3 шт. R12, R13 - 10 кОм - 2шт. R1-R8- 1 кОм-8шт. Подстроечные: R9-R11 - 10кОм-3шт. дросель 12 мкГн L1 - 1шт. Диод VD1 - 1N4004(или 1N4007) S1-S3-3 кнопки Led4-1 зелёный светодиод Led1-Led3-3 красных светодиода микросхемы: L293D+панелька под неё(16 выводов) 24LC04B+панелька под неё(8 выводов) Датчик температуры VR1 - TMP36GT9Z Скачать разводку платы в формате Layout 5.0 и принципиальную схему в формате Splan 7.0 можно по ссылке. 


Источник: www.enore.ru | |
| Категория: Контроллеры | Добавил: Space (22.01.2011) | | |
| Просмотров: 3493 | |
| Всего комментариев: 0 | |